

直流無刷減速電機 圓形57法...

57系列二相步進電機 小體積...

1000W無刷驅動器 12-48V...

BD06L小功率微型直流無...
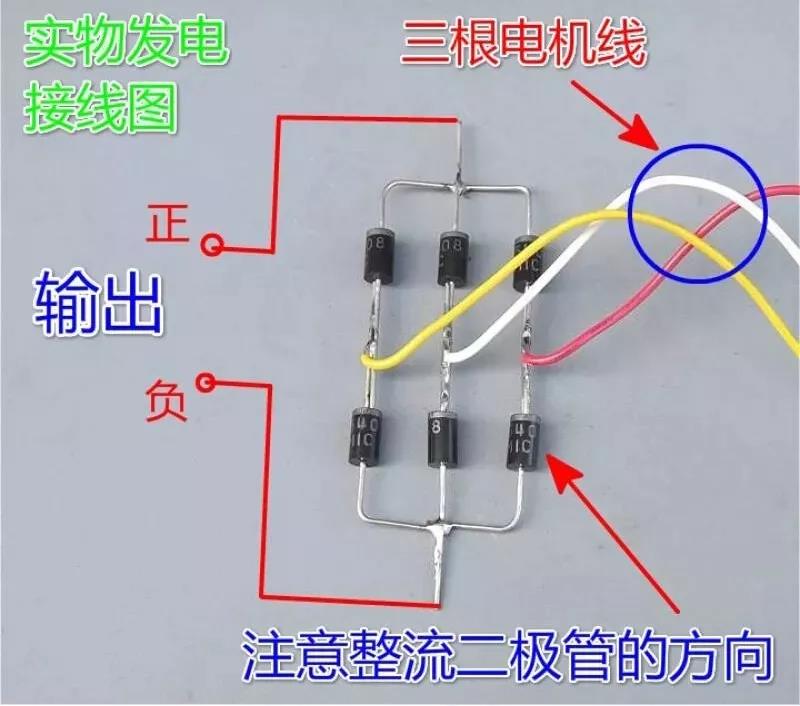
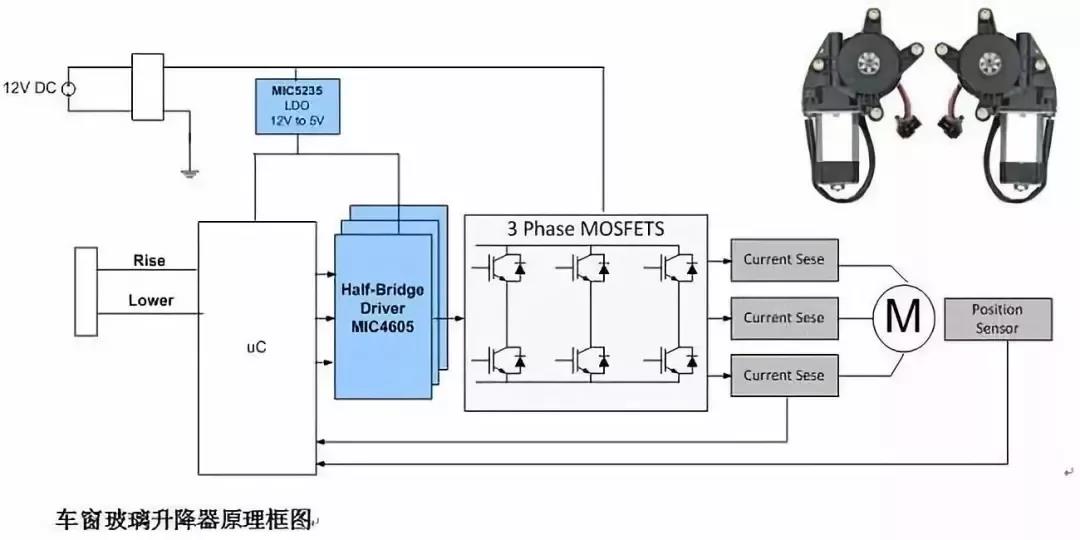
無刷直流(BLDC)電機為同步電機,轉子和線圈繞組中設有永久磁鐵。它們可在電機定子上產生電磁。電氣端子直接連接至定子繞組;因此,轉子上未連接刷子或機械裝置(如有刷電機)。BLDC電機使用直流電源和開關電路,在定子繞組上產生雙向電流。開關電路必須在每個繞組中使用一個高端開關和低端開關,因此一個BLDC電機共使用6個開關。

現代電機設計采用固態開關,如MOSFET或IGBT,這取決于與繼電器相比時電機的速率和電壓。此外,還必須考慮成本、可靠性和尺寸。開關電流產生適當的磁場極性,可吸引相反極性,排斥相同極性。從而產生磁力,促使轉子旋轉。將永久磁鐵用于轉子可為設計師提供機械利益;并可減小尺寸,降低重量。與有刷電機和感應電機相比,BLDC電機的熱特性更優,因而成為掀起機械系統節能新浪潮的理想選擇。
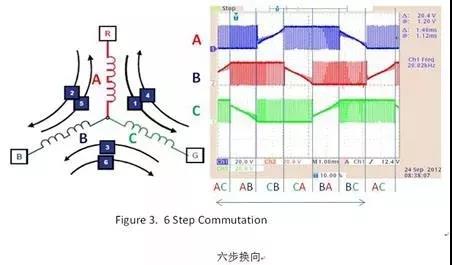
BLDC通常使用三個相位(繞組),每個相位具有120度的導通間隔。
由于為雙向電流,每個相位按照每個導通間隔有兩個步驟。這是一種鍍錫六步換向。例如,換向相序可為AB-AC-BC-BA-CA-CB。每個導電階段標記一個步驟,任何時候只能由兩個繞組導通電流,第三個繞組懸空。未勵磁繞組可用作反饋控制,構成無傳感器控制算法特征的基礎。
為了保持在轉子之前的定子內部的磁場,并產生最佳扭矩,必須在精確的轉子位置完成從一個扇形區到另一個的過渡。通過每 60 度轉向的開關電路獲得最大扭矩。所有開關控制算法均包含在MCU中。微控制器可通過MOSFET驅動器控制開關電路。MOSFET驅動器包含適當響應時間(如維持延遲及上升和下降時間)和驅動能力(包括轉換MOSFET/IGBT “開”或“關”狀態所需的門驅動電壓和電流同步)。
轉子位置對于確定電機繞組換向所需的正確力矩非常重要。在精度要求較高的應用中,可使用霍爾傳感器或轉速計計算轉子的位置速度和轉矩。在首要考慮成本的應用中,逆電動勢 (EMF) 可用于計算位置、速度和轉矩。
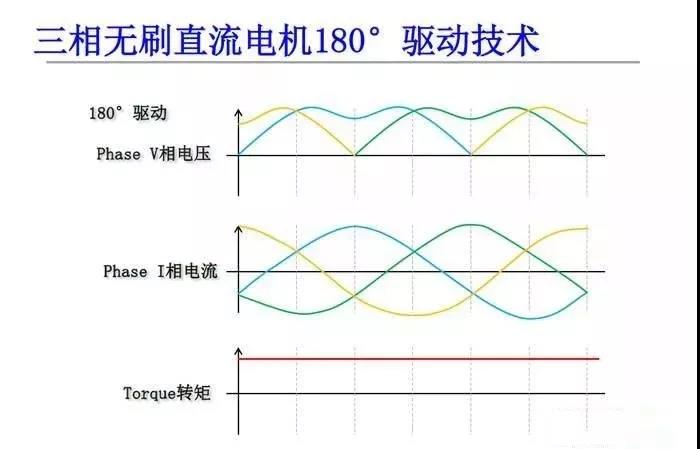
逆電動勢是指永久磁鐵在定子繞組中產生的電壓。電機轉子旋轉時會出現這種情況。共有三個可用于控制和反饋信號的主要逆電動勢特征。第一,適用于電機速度的逆電動勢等級。因此,設計師使用工作電壓至少為標準電壓的2倍的MOSFET驅動器。第二,逆電動勢信號的斜率隨速度增加而增加。第三亦即最后者,如“交叉事件”中逆電動勢信號是對稱的。精確檢測交叉事件是執行逆電動勢算法的關鍵。逆電動勢模擬信號可使用高壓運算放大器和模擬數字轉換器(廣泛應用于最現代的微控制器)按每個混合信號電路轉化至MCU。每個至少需要一個ADC。

使用無傳感器控制時,啟用順序至關重要,這是由于MCU最初不確定轉子的初始位置。首先啟動電機,激勵兩個繞組,同時從逆電動勢反饋回路進行幾次測量,直到確定了精確位置。
通常可使用具有MUC的閉環控制系統操作BLDC電機。MCU可執行伺服回路控制、計算、糾正、PID控制及傳感器管理(如逆電動勢、霍爾傳感器或轉速計)。這些數字控制器通常為8位或更高,需要EEPROM儲存固件,從而獲得設置所需電機速度、方向及維持電機穩定性所需的算法。通常,MCU 可提供允許無傳感器電機控制構架的ADC。該構架可節省寶貴成本和電路板空間。MCU兼具較強可構造性和靈活性,可滿足優化應用算法之所需。模擬IC可為MUC提供高效電源、電壓調整、電壓基準,能夠驅動MOSFET或IGBT及故障保護。采用這兩種技術均可高效地操作三項BLDC電機,且與感應電機和有刷電機價格相當。

