關(guān)閉
云驅(qū)智能

歡迎光臨東莞市云驅(qū)智能科技有限公司 !


直流無刷減速電機(jī) 圓形57法...

57系列二相步進(jìn)電機(jī) 小體積...

1000W無刷驅(qū)動(dòng)器 12-48V...

BD06L小功率微型直流無...
從最早的方波增量信號(hào),到帶換相信號(hào)的方波增量信號(hào),再到絕對(duì)值和正余弦增量的復(fù)合信號(hào),以及最新采用數(shù)字式高速通訊協(xié)議的絕對(duì)值型編碼器,電機(jī)編碼器的發(fā)展已經(jīng)經(jīng)歷了數(shù)代的變革。
與之對(duì)應(yīng),用于檢測(cè)機(jī)械設(shè)備狀態(tài)的編碼器,也經(jīng)歷了幾代的發(fā)展歷程,其中,又以編碼器通信方式的變革最為顯著。
通信方式的變革
最早期的絕對(duì)值型編碼器,采用并口輸出。
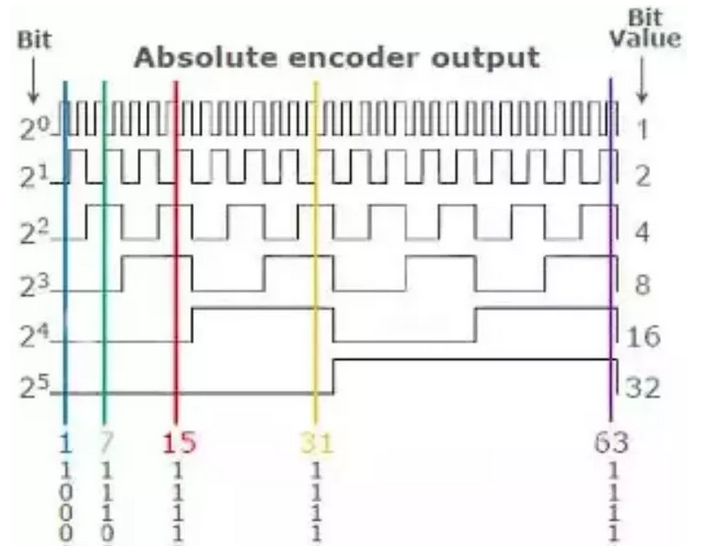
一根線芯代表輸出二進(jìn)制位置值的一位。這樣一來,一個(gè) 10 位(也就是 1,024 步)的編碼器,就需要 12 芯(10芯信號(hào) + 2 芯電源)的通信電纜。
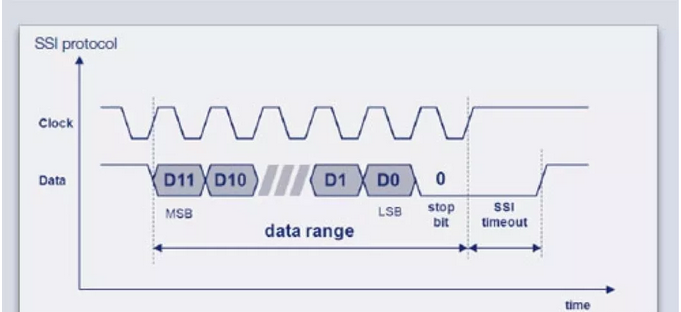
誕生于 1985 年 SSI(串行同步總線)接口,只用 6 芯(4 芯通信 + 2 芯電源)電纜,就能夠達(dá)到信號(hào)的同步傳輸,很好的解決了電纜數(shù)量的問題。
然而,SSI 總線只能支持點(diǎn)到點(diǎn)的信號(hào)傳輸。如果設(shè)備上有多個(gè)編碼器,則分別需要多根編碼器電纜與控制器一一連接。隨著各種基于 RS485 的工業(yè)總線(如,PROFIBUS, DeviceNet, CANOpen...等)的普及,編碼器如同其它傳感器設(shè)備一樣,也實(shí)現(xiàn)了工業(yè)網(wǎng)絡(luò)通信。
如今,工業(yè)網(wǎng)絡(luò)通信已經(jīng)全面進(jìn)入了工業(yè)以太網(wǎng)時(shí)代(如:PROFINET, EtherNet/IP, EtherCAT, POWERLINK...等),編碼器的通信也毫無懸念的轉(zhuǎn)向了相應(yīng)的工業(yè)以太網(wǎng)。
基礎(chǔ)架構(gòu)的改變,帶來的不僅僅是通信速率的提升,更是觀念的改變。就像手機(jī)一樣,進(jìn)入 4G 時(shí)代以后,不僅僅是手機(jī)的音質(zhì)更加清晰了(其實(shí) 3G 的帶寬就已經(jīng)足夠傳輸高品質(zhì)語音了),而且手機(jī)能夠承載更多、更加復(fù)雜的任務(wù),例如流暢的視頻電話和高清的在線視頻播放等。
那么,對(duì)于編碼器來說,其智能化將會(huì)呈現(xiàn)出怎樣的趨勢(shì)呢?

看待未來的發(fā)展,我們必須先從需求談起。傳統(tǒng)的編碼器,無論是增量型或者絕對(duì)值型的編碼器,通常只能夠采集和傳輸角度或長(zhǎng)度的位置及其變化信息,這些信息對(duì)于運(yùn)動(dòng)控制來說至關(guān)重要。然而,隨著工業(yè)生產(chǎn)效率的提升,工業(yè)安全意識(shí)的增強(qiáng),對(duì)于運(yùn)動(dòng)控制反饋的也提出了更高的要求。于是,我們不難看出新一代工業(yè)編碼器的發(fā)展方向。
分辨率和精度的提升
對(duì)于速度控制而言,位置分辨率是一個(gè)非常關(guān)鍵的因素。因?yàn)楫?dāng)速度較快時(shí)(如:6,000 rpm 以上),為了精確反饋實(shí)時(shí)的位置信息,就需要編碼器有著極高的位置刷新頻率。這一方面要求編碼器本身的角度/位置分辨率足夠精細(xì);另一方面,信號(hào)傳輸?shù)乃俣纫惨銐蚩欤员隳軌驅(qū)⒉杉降奈恢眯畔?shí)時(shí)的傳遞到控制器中。
而對(duì)于位置控制而言,情況就會(huì)略有不同,僅僅高分辨率是不夠的。這就好比金店里不能用廚房稱面粉的秤來稱金飾。雖然這兩種秤的分辨率都很高,但是精準(zhǔn)度是不一樣。對(duì)于金飾而言,精準(zhǔn)度的要求明顯要高得多。
對(duì)于旋轉(zhuǎn)編碼器而言,通常采用光學(xué)原理檢測(cè),分辨率和精度均相對(duì)較高。采用玻璃碼盤或者金屬碼盤制成的標(biāo)準(zhǔn)編碼器,通常分辨率可以達(dá)到16~18位(65.536~262144步)精度也可以控制在0.1度以內(nèi)。對(duì)于一些對(duì)控制精度要求較高的場(chǎng)合,比如印刷,或者硅晶圓的搬運(yùn),則可能需要更高分辨率和精度的角度編碼器來實(shí)現(xiàn)。
對(duì)于速度控制精度要求較高的場(chǎng)合,尤其是對(duì)于如印刷等多軸同步運(yùn)動(dòng)的應(yīng)用,位置反饋的刷新時(shí)間就尤為重要。通常要求編碼器實(shí)時(shí)位置刷新時(shí)間不高于2ms。在軸的精確定位和路徑控制中所涉及到的所有傳感器和執(zhí)行機(jī)構(gòu)都必須做到實(shí)時(shí)同步。
一般工業(yè)以太網(wǎng)的編碼器,比如 PROFINET,可以達(dá)到 1ms 的刷新周期。 而在 EtherCAT 網(wǎng)絡(luò)中,通過分布式時(shí)鐘可以使得最小循環(huán)時(shí)間達(dá) 100μs 以內(nèi),這已經(jīng)非常接近高性能伺服驅(qū)動(dòng)系統(tǒng)的位置環(huán)循環(huán)周期(62.5 μs)。
設(shè)備層拓?fù)浣Y(jié)構(gòu)
線性或者樹形的拓?fù)浣Y(jié)構(gòu),很好的解決了靈活布線的問題,但是系統(tǒng)卻會(huì)面臨著因意外故障或斷線而中斷的風(fēng)險(xiǎn)。
在 EtherNet/IP 網(wǎng)絡(luò)中,DLR (Device Level Ring)功能的出現(xiàn),很好的解決了這個(gè)問題。將雙網(wǎng)口的編碼器與系統(tǒng)中其他元件首尾相連,形成一個(gè)具有更高可靠性的閉環(huán)回路,當(dāng)環(huán)路中出現(xiàn)斷線故障時(shí),系統(tǒng)會(huì)立即檢測(cè)到信號(hào)傳輸?shù)闹袛啵⑶以谇袚Q至旁路的同時(shí)發(fā)出警報(bào)。這樣一來單個(gè)電纜中斷將不會(huì)導(dǎo)致其他節(jié)點(diǎn)和整個(gè)系統(tǒng)出現(xiàn)故障。
與之類似,在 PROFINET網(wǎng)絡(luò)中的MRP( MediaRedundancy Protocol)也是一樣,通常 PROFINET只支持線性/樹形拓?fù)浣Y(jié)構(gòu),默認(rèn)不提供冗余網(wǎng)絡(luò)。MRP通過一個(gè)簡(jiǎn)單的設(shè)備顯著提高了系統(tǒng)的可靠性。如果連接失敗(比如電纜斷裂或節(jié)點(diǎn)故障),節(jié)點(diǎn)會(huì)檢測(cè)到這個(gè)故障并嘗試以另一種方式連接到系統(tǒng)的其余部分。之前斷開的連接得到閉合,所有節(jié)點(diǎn)重新連接到網(wǎng)絡(luò)。
目前,各大傳感器廠商的產(chǎn)品數(shù)據(jù)結(jié)構(gòu)描述均有各自的定義,用戶通過描述文件將其導(dǎo)入到控制系統(tǒng)和網(wǎng)絡(luò)中,而設(shè)備與設(shè)備之間不同網(wǎng)絡(luò)的數(shù)據(jù)交換則十分困難。傳統(tǒng)的開放平臺(tái)通信(OPC和COM/DCOM的結(jié)合雖讓開放平臺(tái)通信可以順利擴(kuò)展,但必須基于
Microsoft windows架構(gòu)且需要繁瑣的配置。這導(dǎo)致數(shù)據(jù)的配置和交換極為復(fù)雜。
OPC UA 定義了統(tǒng)一的架構(gòu)(Unified Architecture),使得機(jī)器與機(jī)器之間的自動(dòng)化通信更加流暢。這種架構(gòu)不限制操作系統(tǒng)或是編程語言,是一種面向服務(wù)的架構(gòu)( SOA ),從智能傳感器、智能執(zhí)行機(jī)構(gòu)一直到控制系統(tǒng)和信息網(wǎng)絡(luò),都具有強(qiáng)健的信息安全特性和可擴(kuò)展性。
OPC 基礎(chǔ)服務(wù)是一套抽象的數(shù)據(jù)應(yīng)用描述,和通訊協(xié)定無關(guān),是 OPC UA 機(jī)能的基礎(chǔ)。傳輸層將方法轉(zhuǎn)換為通訊協(xié)定,將資料序列化(或反序列化),再傳送到網(wǎng)絡(luò)上。 為了上述目的,定義了兩種通訊協(xié)定,其中一個(gè)是以效率進(jìn)行過優(yōu)化的二進(jìn)制 TCP 訊定,另一個(gè)則是 Web 服務(wù)導(dǎo)向的協(xié)定。
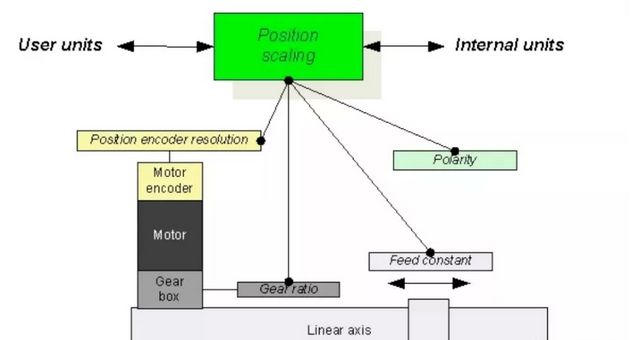
為了能夠?qū)⒕幋a器更加方便的應(yīng)用到控制系統(tǒng)中,需要配置的當(dāng)然不僅僅只有位置分辨率本身。在往復(fù)運(yùn)動(dòng)中,大多數(shù)時(shí)候設(shè)備運(yùn)動(dòng)的一個(gè)周期對(duì)應(yīng)于其連接的多圈編碼器來說,并不是一個(gè)整的圈數(shù)。為了讓客戶端的二次開發(fā)更加便利,需要精確的設(shè)置設(shè)備軸與編碼器軸之間的傳動(dòng)比。市面上已有不少智能型的編碼器具有循環(huán)軸( Round Axes功能,只需要設(shè)置分子和分母便可精確匹配該傳動(dòng)比。
另一方面,位置和速度的單位偏好也會(huì)因客戶習(xí)慣而有所不同,多種可選的輸出單位,可以使應(yīng)用配置的導(dǎo)入達(dá)到事半功倍的效果。為了最大限度的提高生產(chǎn)效率,預(yù)設(shè)值的設(shè)置還需要具有實(shí)時(shí)的在線功能。即使在設(shè)備運(yùn)轉(zhuǎn)時(shí),也可以與控制循環(huán)同步進(jìn)行絕對(duì)位置調(diào)整(也稱為“偏移調(diào)整”)而無需停機(jī)。
觸手可及的診斷信息和生命周期運(yùn)行數(shù)據(jù)
設(shè)備的當(dāng)前運(yùn)行狀態(tài)如何?一旦出現(xiàn)故障,有哪些診斷數(shù)據(jù)?這些情況,用戶是需要第一時(shí)間了解的。因此,全面的故障警告和報(bào)警信息尤為重要。
然而,大部分的故障都是事前有征兆的,這也就是預(yù)防性維護(hù)的重要性。要在故障發(fā)生前排除隱患,通常有兩個(gè)辦法:定期排查或者有針對(duì)性的檢查。
定期的做法,雖然避免了意外停機(jī)造成的損失,但是需要耗費(fèi)大量精力和成本,因?yàn)椴煌O(shè)備的運(yùn)行頻率和狀態(tài)各不相同。

通過采集和儲(chǔ)存的診斷信息和生命周期數(shù)據(jù),可以極大的提高預(yù)防性維護(hù)的效率。智能編碼器通常能夠處理上電時(shí)長(zhǎng)、旋轉(zhuǎn)時(shí)長(zhǎng)、工作轉(zhuǎn)速和環(huán)境溫度...等生命周期內(nèi)的維護(hù)數(shù)據(jù),以便于設(shè)備維保人員有針對(duì)性的進(jìn)行預(yù)防性維護(hù)。
版權(quán)所有:東莞市云驅(qū)智能科技有限公司
粵ICP備:粵ICP備17055283號(hào)
電話:0769-21986613
郵箱:
地址:
技術(shù)支持:全美東莞網(wǎng)站建設(shè)
