0769-21986613

產品中心
CLOUD DRIVE PRODUCTS
BD10LR-直流無刷驅動器24-48VDC RS-485通訊型無刷電機驅動器 小體積無刷電機驅動器

DB10LR是云驅公司研發生產的一款以高性能DSP為運算核心,多功能控制方式直流無刷驅動器。
全數字式設計使其擁有靈活多樣的輸入控制方式,完善的軟硬件保護功能,驅動器可通過RS-485通信
接口與計算機相連,實現參數調整,保護參數,電機參數,加減速時間等參數的設置,
產品介紹
● 加/減速時間設定???????● 電機極數選擇
● 開/閉環控制???????????● 最大電流輸出設定
● 電機堵轉力矩保持 ● 各種報警指示
● 內置電位器RV調速控制?● 外接電位器調速控制
● 外部模擬信號調速 ● PWM調速控制
● RS-485通訊控制 ●?報警后自動復位再起動
支持功能深度定制。專機化應用
項目
最小值
典型值
最大值
單位
輸入電壓
10
24
60
V
輸出電流
1
8
10
A
欠壓保護
9
VDC
過壓保護
60
VDC
轉速控制
100
3000
30000
Rpm
重量
0.1KG
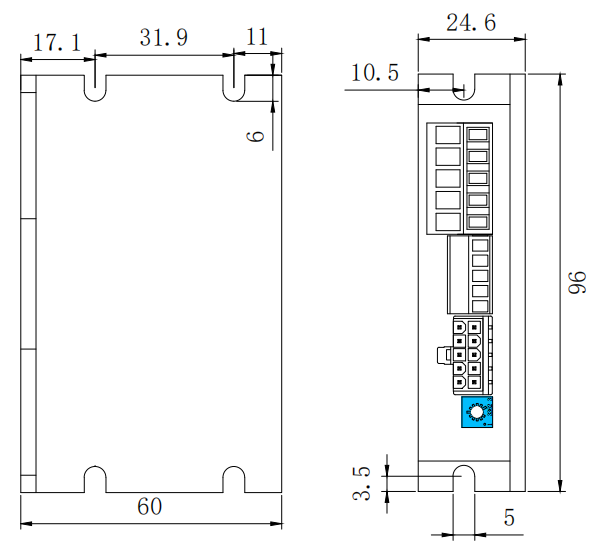
尺寸
96*60*24.6 單位MM
調速方式
1: ?0-5VDC模擬量輸入
2: ?0-100%PWM輸入 (PWM頻率范圍: [1Kz-20KHz)
3: 外接電位器調速
4: 通過RS-485通訊設定
過流保護功能
當電流超過工作電流設置值并持續一設定時間后產生過流保護
過壓
當電壓超過60V時產生過電壓保護
欠壓
當電壓低于9V時產生欠電壓保護
霍爾異常
霍爾信號出現異常值
加減速時間設置
通過軟件上位機軟件可以設置加減速度時間
|
信號 |
端子 |
內容 |
|
電源輸入 |
+ |
直流電源輸入正極。(電壓范圍DC24~60V)
|
|
- |
直流電源輸入負極。 |
|
|
電機連接 |
W |
直流無刷電機W相。 |
|
V |
直流無刷電機V相。 |
|
|
U |
直流無刷電機U相。 |
|
|
霍爾信號 |
GND |
直流無刷電機霍爾信號接地線。 |
|
HC |
直流無刷電機霍爾信號HC。 |
|
|
HB |
直流無刷電機霍爾信號HB。 |
|
|
HA |
直流無刷電機霍爾信號HA。 |
|
|
+5V |
直流無刷電機霍爾信號電源線。 |
|
|
控制信號 |
+5V |
電位器外接電源線。 |
|
SV |
① 外接調速電位器; ② 外部模擬信號調速輸入; ③ PWM調速信號輸入。 |
|
|
GND |
公共端口 (0V參考電平)。 |
|
|
FR |
FR端與GND端斷開或高電平輸入時電機正轉,短接或低電平輸入電機反轉。 |
|
|
EN |
EN端和GND端斷開或高電平輸入時電機停止運行,短接或低電平輸入時電機運行。 |
|
|
BK |
BK端與GND端斷開或高電平輸入時電機停止運行,短接或低電平輸入時電機運行。 |
|
|
A+ |
RS-485通訊端口 |
|
|
B- |
RS-485通訊端口 |
|
|
輸出信號 |
PG |
與電機的運行轉速相應,輸出相對應的脈沖頻率。利用PG 可以計算出電機的轉速。計算公式為: N(rpm)= (F/P)×60 F:輸出脈沖頻率;Hz: P: 電動機極對數: N:電動機轉速 例:電機4對極 F=1sec/2ms=500Hz N(rpm)=(500/4)×60=2500 |
|
ALM |
電機或驅動控制故障信號輸出信號,正常為5V,出現故障時電平為0V。 |
|
EN端和GND端的出廠設定是將EN端和GND端開路。當接通電源時,電機不運行。需要EN和BK同時與GND連接后才能運行 連接或斷開EN端和GND端的可控制電機的運行和停止。當EN端和GND端連接時電機啟動。反之電機減速停止。 ◆通過在EN與GND之間接入開關或使用PLC等控制其通斷,即可實現電機啟動與停止的切換。 |
|
BK端和GND端的出廠設定是BK端和GND端開路。當接通電源時,電機不運行。需要EN和BK同時與GND連接后才能運行。 連接或斷開BK端和GND端的可控制電機啟動和快速停止。 當斷開BK端和GND端的連接線時,電機快速停止。 ◆通過在BK與GND之間接入開關或使用PLC等控制其通斷,即可實現電機啟動與剎車停止的切換。 |
EN與BK的區別和使用選擇:
①EN控制的為自然停止;BK控制為快速停止
②EN和BK控制的啟動狀態相同。
③選擇EN或BK其中一種方式控制啟停的時候,
另一種方式的接線應保持連接狀態。
方向控制(FR)
|
FR端和GND端的出廠設定是FR端和GND端并未相連。當接通電源時,電機正轉。 連接或斷開FR端和GND端的連接線可控制電機的正反轉。 當斷開FR端和GND端的連接線時,電機反轉。 當連接FR端和GND端的連接線時,電機正轉。 |
通訊協議方式
PC機或PLC可以作為主機控制驅動器工作。具體通訊方式如下:
?(1) 驅動器為從機,主從式點對點通信。
?(2) 驅動器為從機,主機控制多從機通信。 ?
?(3) 主機使用廣播地址發送命令時,多從機同步運行,主機使用廣播地址發送命令時,從機不應答。 ?
?(4) MODBUS通訊協議RTU方式。
寫入數據說明
傳輸方式異步串行、半雙工傳輸方式。在同一時刻主機和從機只能有一個發送數據,而另一個只能接收數據。數據在串行異步通訊過程中,是以報文的形式,一幀一幀發送。
例如: ?從機地址1為例。
第一步:發送485使能:010600B60001A9EC????從機返回:010600B60001A9EC ?485使能每次上電只發送一次即可
??延時150MS以上。
第二步:發送正轉命令:010600660001A815????從機返回:010600660001A815 ?設定電機為正轉
延時150MS以上。
第三步:發送轉速命令:0106005603E86964 ???從機返回:0106005603E86964 ?設定轉速1000轉
延時150MS以上。
其他功能參考以下寫入數據表進行控制設定即可。
機械尺寸
- 上一篇:已經沒有了
- 下一篇:已經沒有了

