關(guān)閉
云驅(qū)智能

歡迎光臨東莞市云驅(qū)智能科技有限公司 !

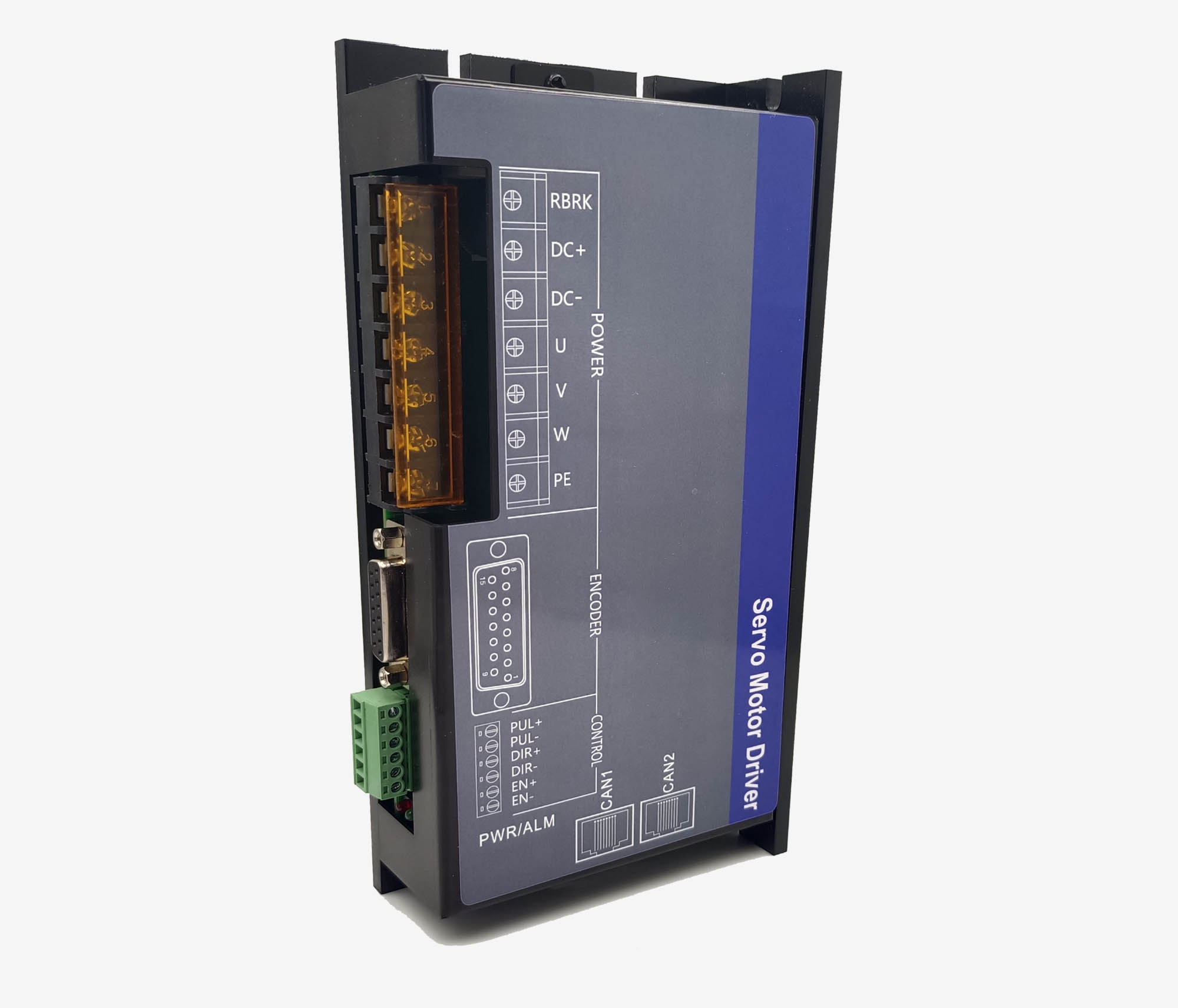
ASD620A是云驅(qū)智能研發(fā)的一款以高性能DSP為運算核心,以及高速精確的矢量控制算法,多功能控制方式低壓伺服驅(qū)動器。低壓永磁同步電機(jī)進(jìn)行精確的轉(zhuǎn)矩、轉(zhuǎn)速、位置控制。提供了兼容步進(jìn)電機(jī)的控制端口,是步進(jìn)控制系統(tǒng)理想的性能升級替代產(chǎn)品方案。在使用低壓永磁同步電機(jī)的部分場合,達(dá)到了類似于高壓交流伺服的高性能控制要求,在成本上有很大優(yōu)勢。另外還有調(diào)速方式多樣,調(diào)速范圍寬,功能齊全,硬軟件保護(hù)完備,可連接上位機(jī)軟件進(jìn)行參數(shù)配置等優(yōu)勢。產(chǎn)品廣泛應(yīng)用于噴繪機(jī)、雕刻機(jī)、小型數(shù)控機(jī)床、自動裝配設(shè)備等多種自動化控制領(lǐng)域。
產(chǎn)品介紹
● 采用FOC磁場定位技術(shù)和SVPWM
● 兼容步進(jìn)電機(jī)的隔離控制信號端口
● 四象限工作,內(nèi)置剎車電阻
● 提供有單端/差分脈沖、PWM以及±10 V模擬信號等多種指令輸入方式
● 調(diào)速精度可達(dá)±0.1 %,具備良好的動態(tài)響應(yīng)性能
● 提供過壓、欠壓、過流、過溫、短路保護(hù)、霍爾信號錯誤等報警功能
●提供過壓、欠壓、過流、過溫、短路保護(hù)、霍爾信號錯誤等報警功能
● 提供CAN通訊端口,支持CAN2.0B協(xié)議 可實現(xiàn)多機(jī)級聯(lián)
|
參數(shù) |
說明 |
|
|
電源電壓 |
24 -48V直流電壓 |
|
|
輸出電流 |
額定電流20 A,峰值電流40 A(環(huán)境溫度25 ℃下) |
|
|
輸出功率 |
≤1000 W |
|
|
適配電機(jī) |
配有標(biāo)準(zhǔn)增量式編碼器 |
|
|
工作模式 |
轉(zhuǎn)矩、速度、位置閉環(huán)模式 |
|
|
命令方式 |
單端/差分脈沖、PWM、±10 V模擬信號、CAN通訊指令 |
|
|
調(diào)速范圍 |
1~3000 rpm(以2500線編碼器、4對磁極電機(jī)為例) |
|
|
調(diào)速精度 |
±0.1 % |
|
|
保護(hù)功能 |
過壓、欠壓、過流、過溫、短路保護(hù)、霍爾信號故障及位置超差等報警功能 |
|
|
載波頻率 |
20 kHz |
|
|
工作環(huán)境 |
場合 |
無腐蝕性、易燃、易爆、導(dǎo)電性氣體、液體和粉塵 |
|
溫度 |
-20~50 ℃ |
|
|
濕度 |
不高于85 %RH |
|
|
散熱方式 |
自然冷卻或外加散熱器 |
|
|
外形尺寸 |
200×100×42 單位:mm |
|
|
重量 |
560 g |
|
|
端口 |
引腳名 |
說明 |
備注 |
|
電源電機(jī)端口 |
RBRK |
外置剎車電阻端口 |
剎車過猛時需外接電阻 |
|
VDC |
電源正極 |
|
|
|
GND |
電源負(fù)極 |
|
|
|
U |
電機(jī)U相 |
|
|
|
V |
電機(jī)V相 |
|
|
|
W |
電機(jī)W相 |
|
|
|
PE |
電機(jī)屏蔽地 |
電機(jī)無此接線的可不接 |
|
|
反饋信號端口 |
HU+,HU- |
霍爾差分信號U相端 |
單端信號只用接+端即可 |
|
HV+,HV- |
霍爾差分信號V相端 |
同上 |
|
|
HW+,HW- |
霍爾差分信號W相端 |
|
|
|
EA+,EA- |
編碼器差分信號A相端 |
|
|
|
EB+,EB- |
編碼器差分信號B相端 |
|
|
|
EZ+,EZ- |
編碼器差分信號Z相端 |
|
|
|
E+5V |
反饋信號電源 |
最大提供250mA電流 |
|
|
GND |
反饋信號地 |
|
|
|
控制信號端口 |
PUL+ |
脈沖差分信號+端 |
|
|
PUL- |
脈沖差分信號-端 |
|
|
|
DIR+ |
方向差分信號+端 |
|
|
|
DIR- |
方向差分信號-端 |
|
|
|
EN+ |
使能差分信號+端 |
|
|
|
EN- |
使能差分信號-端 |
|
|
|
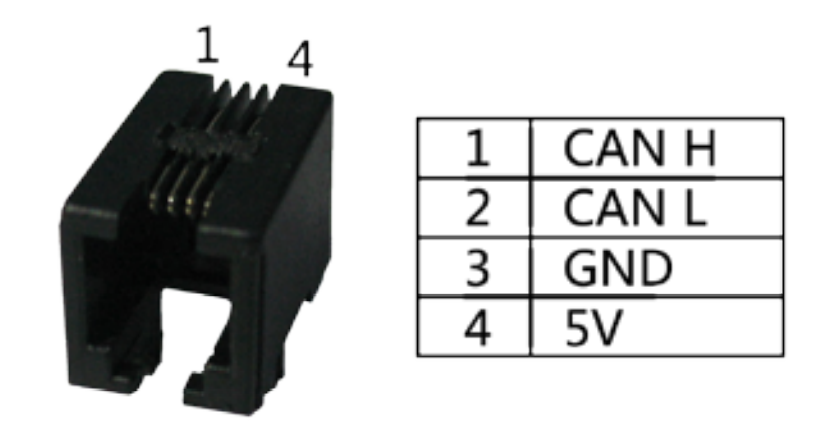
通信端口 |
CAN |
CAN通訊說明 |
詳見11章節(jié) |
|
指示燈 |
PWR/ALM |
電源及報警指示燈 |
|
ASD620A伺服驅(qū)動器所有出廠默認(rèn)的工作模式為:外部脈沖信號端口控制的位置環(huán)工作模式。
編碼器信號經(jīng)過4倍頻處理,對于1000線編碼器的電機(jī),來自PUL端口的4000個脈沖對應(yīng)電機(jī)轉(zhuǎn)過一圈。
驅(qū)動器提供多種控制模式及指令方式,用戶可根據(jù)自己的應(yīng)用場合進(jìn)行選擇。
利用常規(guī)外部控制信號端口調(diào)速的操作步驟為:
1) 確認(rèn)PUL、DIR端口的控制模式;
2) 連接電機(jī)三相到POWER端子區(qū)的U、V、W端子;
3) 連接編碼器接線到FEEDBACK端子區(qū);
4) 確認(rèn)連接好SIGNAL端子區(qū)的PUL、DIR等端口;
5) 連接電源,EN使能端口懸空,PUL端口接入脈沖信號,控制電機(jī)運轉(zhuǎn)。
此外,也可通過CAN總線端口直接進(jìn)行命令控制。具體見11章節(jié)。
7: 信號端口功能說明
如上圖所示,為出廠默認(rèn)配置下,驅(qū)動器按照各個信號端口控制的時序表現(xiàn)出的工作狀態(tài)。注意:
1) EN信號端口電壓差為0 V或懸空時為使能狀態(tài);
2) 使能命令應(yīng)提前方向命令至少5 us;
3) 方向命令應(yīng)提前脈沖命令至少5 us;
4) 脈沖信號的高、低電平持續(xù)時間至少2.5 us。
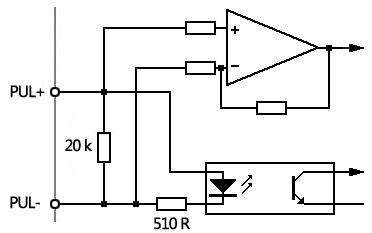
上圖為PUL端口內(nèi)部原理圖,同時接入了高速隔離管光耦以及模擬運放的輸入。默認(rèn)設(shè)置為接受脈沖信號,用于提供速度、位置等控制命令。
該輸入端口兼容3.3~5 V的脈沖信號,可直接接入,最大支持500 kHz脈沖信號。
如果接入24 V等其他邏輯信號,需要外接相應(yīng)阻值的電阻,下同。
配置為模擬信號輸入時,接受±10 V范圍內(nèi)的模擬信號。
通過CAN通訊端口配置的方法見11章節(jié)。
該輸入端口兼容3.3~5 V電壓的脈沖信號,接入了高速隔離光耦,最大支持500 kHz脈沖信號,默認(rèn)配置為控制電機(jī)方向的信號。
可以配置為與PUL端口一同接受雙脈沖控制指令的模式。
通過CAN通訊端口配置的方法見11章節(jié)。
該輸入端口兼容3.3~5 V電壓的數(shù)字信號,接入了低速隔離光耦。
當(dāng)該端口壓差為0 V或者懸空時為驅(qū)動器使能狀態(tài);當(dāng)有高電平時,驅(qū)動器失能。
驅(qū)動器提供CAN總線端口用于參數(shù)配置以及直接控制。接口定義如下:
1)當(dāng)驅(qū)動器的默認(rèn)參數(shù)和功能不足以滿足控制的需要時,可以通過CAN端口在PC端的圖形化上位機(jī)軟件EzCAN上進(jìn)行相關(guān)參數(shù)的配置。
具體的配置方法見《EzCAN上位機(jī)說明書》。
2)驅(qū)動器通過CAN端口,可以直接接受總線式的命令。CAN總線支持多個節(jié)點的集中級聯(lián)控制,通過一個上位機(jī)發(fā)送命令,實現(xiàn)多機(jī)的協(xié)同工作。
在控制時常用的單位:速度——線/s,位置——線
注意,利用CAN端口進(jìn)行控制時,所有外部控制信號端口失效。
速度RPM=線/S*60/(編碼器線速*4)
例如:1200RPM=200000*60/(2500*4)
綠色LED為電源指示燈,當(dāng)驅(qū)動器接通電源正常工作時,綠燈常亮。
紅色LED為故障指示燈,當(dāng)驅(qū)動器出現(xiàn)故障時,綠燈滅,紅燈以一定的周期循環(huán)閃爍,閃爍的次數(shù)n代表不同的故障信息。
閃爍的時序圖如下:
指示燈的各種狀態(tài)具體含義如下表所示:
|
LED狀態(tài) |
故障說明 |
產(chǎn)生的原因 |
處理辦法 |
|
綠燈常亮 |
無故障 |
|
正常運行 |
|
紅燈 閃爍1次 |
過壓報警 VDC≥60 V |
輸入電壓過高 |
降低供電電壓, EN復(fù)位或重啟 |
|
急速剎車或者被負(fù)載拖動發(fā)電造成再生制動能量太大 |
減緩剎車過程或外接剎車電阻 |
||
|
內(nèi)置剎車電阻損壞 |
返廠維修 |
||
|
紅燈 閃爍2次 |
欠壓報警 VDC ≤15 V |
輸入電壓過低 |
提高供電電壓, EN復(fù)位或重啟 |
|
加速過程太猛導(dǎo)致電壓瞬間跌落 |
減緩加速過程或降低負(fù)載 |
||
|
紅燈 閃爍3次 |
過流報警 輸出電流≥12 A |
負(fù)載太大或遇到堵轉(zhuǎn)等沖擊 |
降低負(fù)載, EN復(fù)位或重啟 |
|
紅燈 閃爍4次 |
過溫報警 溫度≥70 ℃ |
長期運轉(zhuǎn)在大負(fù)載狀態(tài)下 |
減小負(fù)載,待自然冷卻后重啟 |
|
驅(qū)動器的散熱條件惡劣 |
外置風(fēng)扇、散熱片等 |
||
|
紅燈 閃爍5次 |
霍爾信號故障 出現(xiàn)全高/全低的情況 |
霍爾信號接線錯接 |
檢查霍爾接線,連接正確后重啟 |
|
電機(jī)霍爾信號故障 |
更換電機(jī) |
||
|
紅燈 閃爍6次 |
位置超差 |
參數(shù)不合適導(dǎo)致電機(jī)跟隨太慢 |
優(yōu)化參數(shù) |
|
負(fù)載太大導(dǎo)致電機(jī)無法跟隨指令 |
降低負(fù)載 |
||
|
指令超限,超過電機(jī)響應(yīng)能力 |
減緩指令變化 |
||
|
紅燈常亮 |
硬件過流報警 驅(qū)動器內(nèi)部瞬間電流過大 |
電機(jī)線路相序錯誤,電機(jī)接線短路或斷路 |
檢查電機(jī)及霍爾線路后重啟 |
|
加速太猛或負(fù)載太大 |
減緩加速、降低負(fù)載 |
||
|
驅(qū)動器內(nèi)部損壞 |
返廠維修 |
9: 安裝尺寸圖

版權(quán)所有:東莞市云驅(qū)智能科技有限公司
粵ICP備:粵ICP備17055283號
電話:0769-21986613
郵箱:
地址:
技術(shù)支持:全美東莞網(wǎng)站建設(shè)
